
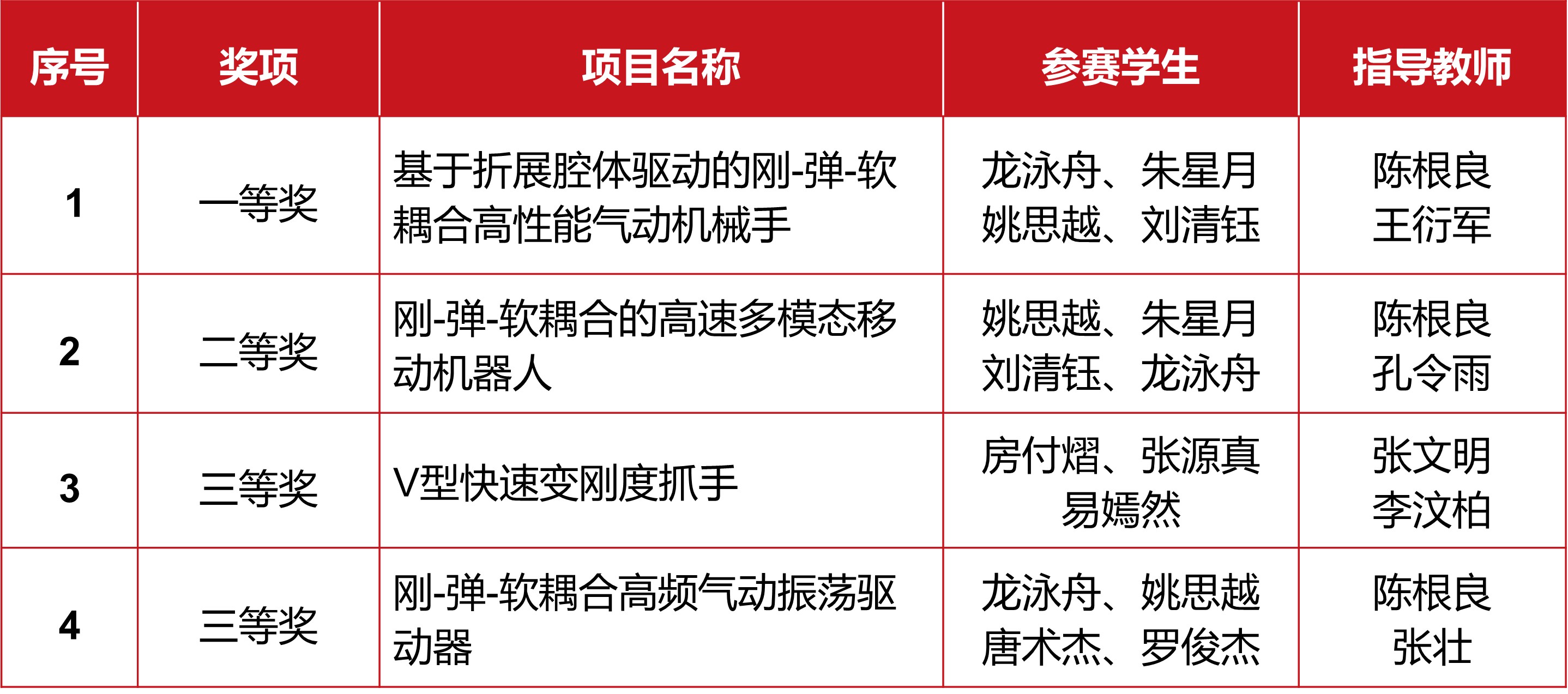
11月15-17日,第九届软体机器人大会——基础理论与关键技术研讨暨软体机器人创新设计竞赛举办,我院学子获一等奖1项、二等奖1项、三等奖2项。

一等奖项目简介
项目名称:基于折展腔体驱动的刚-弹-软耦合高性能气动机械手
参赛学生:龙泳舟、朱星月、姚思越、刘清钰
指导教师:陈根良、王衍军
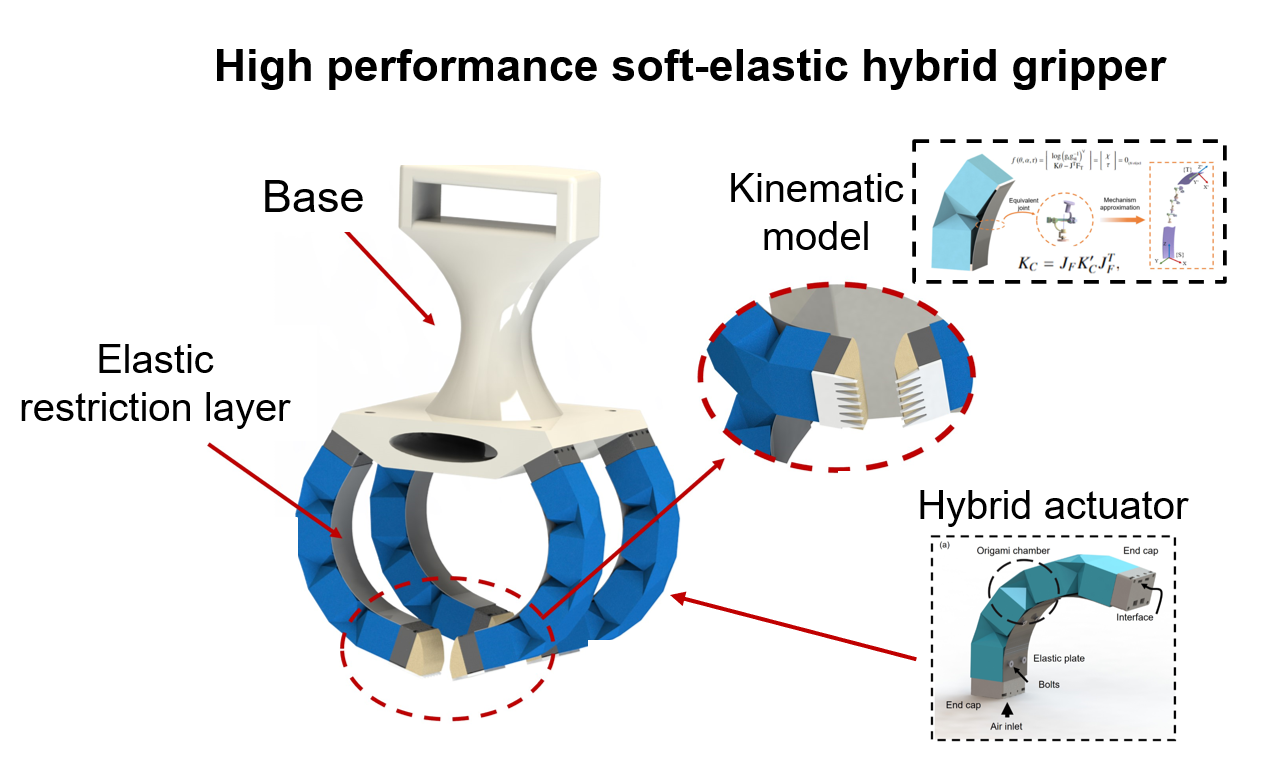
柔性机械手得益于其固有的安全性和良好的人机交互能力,在生产生活中具有广泛的应用前景。在抓取作业中,对跨尺度、多种类物品的操作是机械手设计的一项难点,对抓取机构的可达工作空间、承载力特性和运动精度均提出较高要求。针对上述问题,项目提出一种基于折展腔体驱动的刚-弹-软耦合高性能气动机械手,其驱动单元由带刚性组件的柔性折展驱动腔和弹性梁组成,具有工作空间大、运动精度高、响应速度快和力学性能好的特点。该设计在抓取赛道的全部6项测试中获得满分,并以最快抓取速度荣获一等奖。
2015年,软体机器人大会——基础理论与关键技术研讨暨软体机器人创新设计竞赛由浙江大学发起,旨在为在校学生提供相互交流技术和思想的平台,提升软体机器人的教育与技术水平,探索软体机器人的创新设计方法。此次竞赛由清华大学主办,分为开放主题海报评比、软体机器手物品抓取比赛、软体机器人越野竞赛以及绿色环保软体机器人创意比赛4个赛道,各赛道分别设立一等奖、二等奖、三等奖及优秀奖。
