题目:Elastomer-Based Actuators for Wearables Haptics and Soft Robotics
时间:2019年4月18日 10:00-11:30
地点:bat365在线中国官网登录入口 F103会议室
邀请人:谷国迎 教授(机器人研究所)
Biography

Herbert Shea is a full professor at the Ecole Polytechnique Fédérale de Lausanne (EPFL) in Switzerland. He studied physics at McGill University (B.Sc. 1991) and then at Harvard University (Ph.D. 1997). After 2 years as a post-doc at IBM’s T.J. Watson Research Center, he joined what was then Lucent Technologies’ Bell Labs where he became the technical manager of the Microsystems Technology group.In 2004 Herb joined the EPFL in Switzerland where he leads the Soft Transducers Lab (EPFL-LMTS). His research is centered on elastomer-based actuators for wearable haptics and smart soft robotics.Herb has published over 90 papers in renowned peer-reviewed journals, and is the president of the EuroEAP society.
Abstract
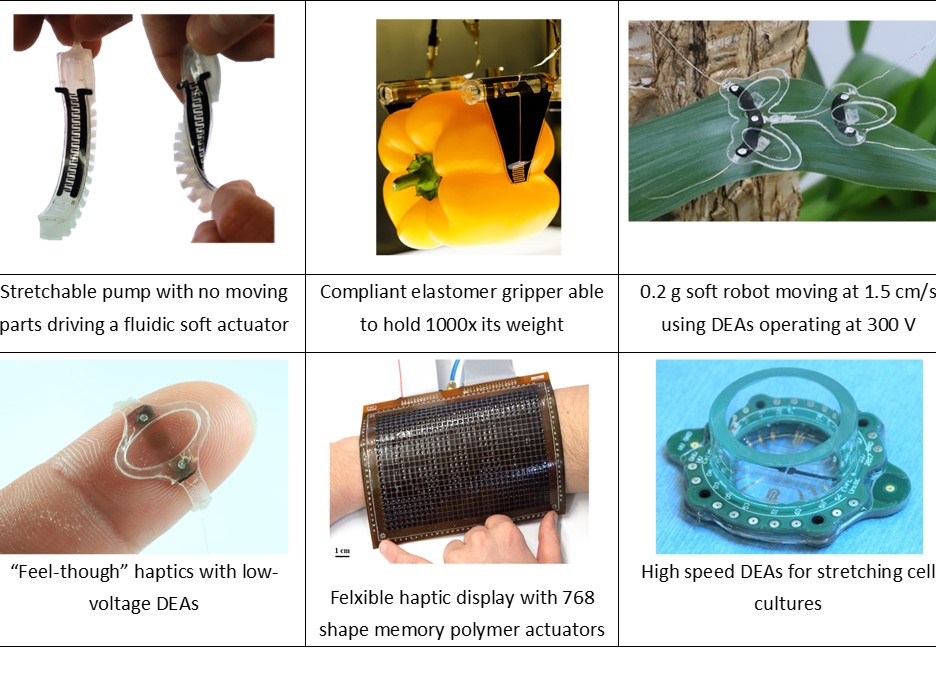
Our research centers on mm- to cm-scale elastomer-based actuators driven by electrostatic forces. Using examples from our work in soft robotics and wearable haptics, I will illustrate how we have addressed many key limitations of electrically-driven soft actuators, including obtaining high forces (16 N for a 1 g device), high speed (5 kHz), and reducing drive voltage to 300 V, a level at which we can use SMD components for compact control electronics. This has enabled us to make fast untethered soft robots that autonomously follow complex paths, robust wearable haptic interfaces only 18 µm thick, and compliant grippers able to delicately manipulate fruit and vegetables. I will introduce a stretchable all soft-matter pump that allows making soft robots using fluidic actuators, but completely does away with the need for pumps or compressors. Our ongoing work is aimed at embedding intelligence in these soft machines.